近日,我院天然橡胶智能化生产团队2021级硕士研究生杨慧同学在张喜瑞教授和张志富副教授的共同指导下,在中科院二区SCI期刊FORESTS上发表最新学术论文(如图1所示),题目为“A 3D Lidar SLAM System Based on Semantic Segmentation for Rubber-Tapping Robot”。
图1 文章首页
本文提出了一种基于语义分割的SLAM系统(如图2所示),称为Se-LOAM。该系统对比传统SLAM算法具有以下创新性:
1.在传统算法前端加入语义分割模型,提取树干点云特征,以减少全局地图内存消耗。
2.对树干点云进行聚类后,基于维特比算法对每个单独的橡胶树实例进行分割。将树实例的点云拟合为圆柱形树干模型,用于语义聚类关联和位置估计,以提高对局部地图关键帧匹配的准确性。
实验结果表明,该系统在建立在线地图时非常精确,树干在地图中的位置更加清晰,为自走式割胶机器人提供了一种强大的SLAM方法。
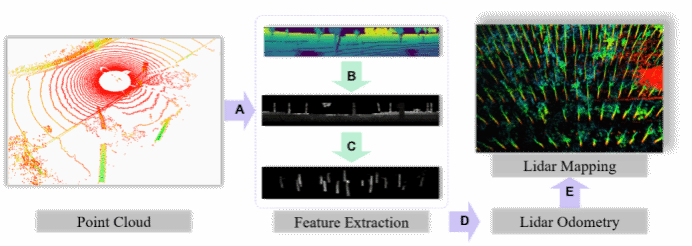
图2 Se-LOAM系统结构
文章链接:https://www.mdpi.com/1999-4907/14/9/1856
本研究展示了海南大学天然橡胶智能化生产团队在自走式割胶机器人技术方面的最新进展。

 机电工程学院公众号
机电工程学院公众号 致远班
致远班